Pasos para conectar los pines
Paso 1:
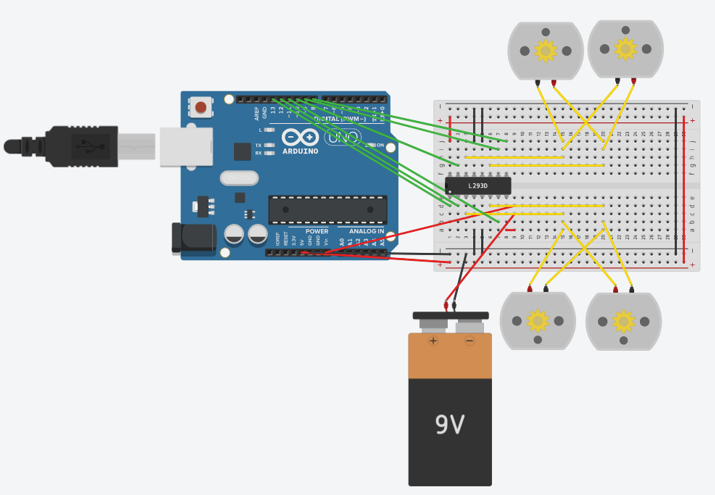
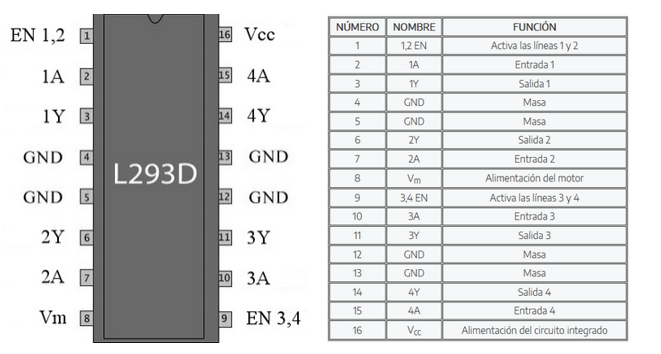
Teniendo en cuenta las especificaciones de este módulo electrónico, y las salidas que tiene de tierra GND y alimentación 5V, conectaremos los siguientes pines a las filas de la protoboard pintados para conectar salidas de polo negativo (-) GND y positivo (+) 5V.- – Conectar los pines 4, 5, 12 y 13 a GND (tierra) a la fila de polo negativo (-) de la protoboard.
- – Conectar el cable de GND (tierra) de la pila de 9V a la fila de polo negativo (-) de la protoboard.
- – Conectar el pin 16 a la fila de polo positivo (+) de la protoboard.
- – Conecta el pin 8 al polo positivo (+) de la pila de 9V, y también al pin Vin de la placa Arduino UNO.
- – Conectar uno de los pines GND (tierra) de la placa Arduino UNO a la fila de polo negativo (-) de la protoboard.
- – Conectar el pin 5V de la placa Arduino UNO a la fila de polo positivo (+) de la protoboard.
Paso 2:
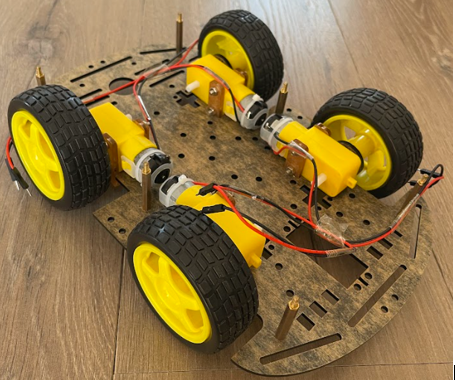
Ahora conectaremos cada uno de los 4 motores DC a la protoboard. Cada motor DC posee un cable rojo y uno negro, y esto debe coincidir para que los motores giren todo el mismo sentido, como podemos ver en la siguiente imagen:
Motor DC
Además, hay que tener en cuenta que dos de los cuatro motores irán conectados a la salida 1 y salida 2 del módulo L293D, y los dos otros motores irán conectados a salidas 3 y 4 del módulo L293D.
- – Conectar el cable negro de los motores superior izquierdo e inferior izquierdo al pin 3 (salida 1).
- – Conectar el cable rojo de los motores superior izquierdo e inferior izquierdo al pin 6 (salida 2).
- – Conectar el cable negro de los motores superior derecho e inferior derecho al pin 14 (salida 4).
- – Conectar el cable rojo de los motores superior derecho e inferior derecho al pin 11 (salida 3).
Paso 3:
Por último, sólo queda conectar el módulo L293D a nuestra placa Arduino UNO. Los pines GND (tierra) y 5V de la placa Arduino UNO ya los conectamos a la protoboard en el paso 1. Por lo que sólo nos queda conectar los pines digitales de la placa Arduino UNO al módulo L293D, que permitirán controlar y mover todos los motores hacia delante o hacía atrás. Y también combinar motores para girar a la derecha y a la izquierda. De manera que:- – Conectar el pin 1 (enable12) del módulo L293D al pin 13 de la placa Arduino UNO.
- – Conectar el pin 2 (entrada1) del módulo L293D al pin 12 de la placa Arduino UNO.
- – Conectar el pin 7 (entrada2) del módulo L293D al pin 11 de la placa Arduino UNO.
- – Conectar el pin 9 (enable34) del módulo L293D al pin 8 de la placa Arduino UNO.
- – Conectar el pin 10 (entrada3) del módulo L293D al pin 9 de la placa Arduino UNO.
- – Conectar el pin 15 (entrada4) del módulo L293D al pin 10 de la placa Arduino UNO.